Robots can be taught physically or by precision programming based on coordinates.
Ultralight humanoid robotic arm
Ultra-lightweight elongated robot arm
Ultra lightweight economical robotic arm
Entry-level robotic arm
Complex integration
10+ accessories for a wide range of uses




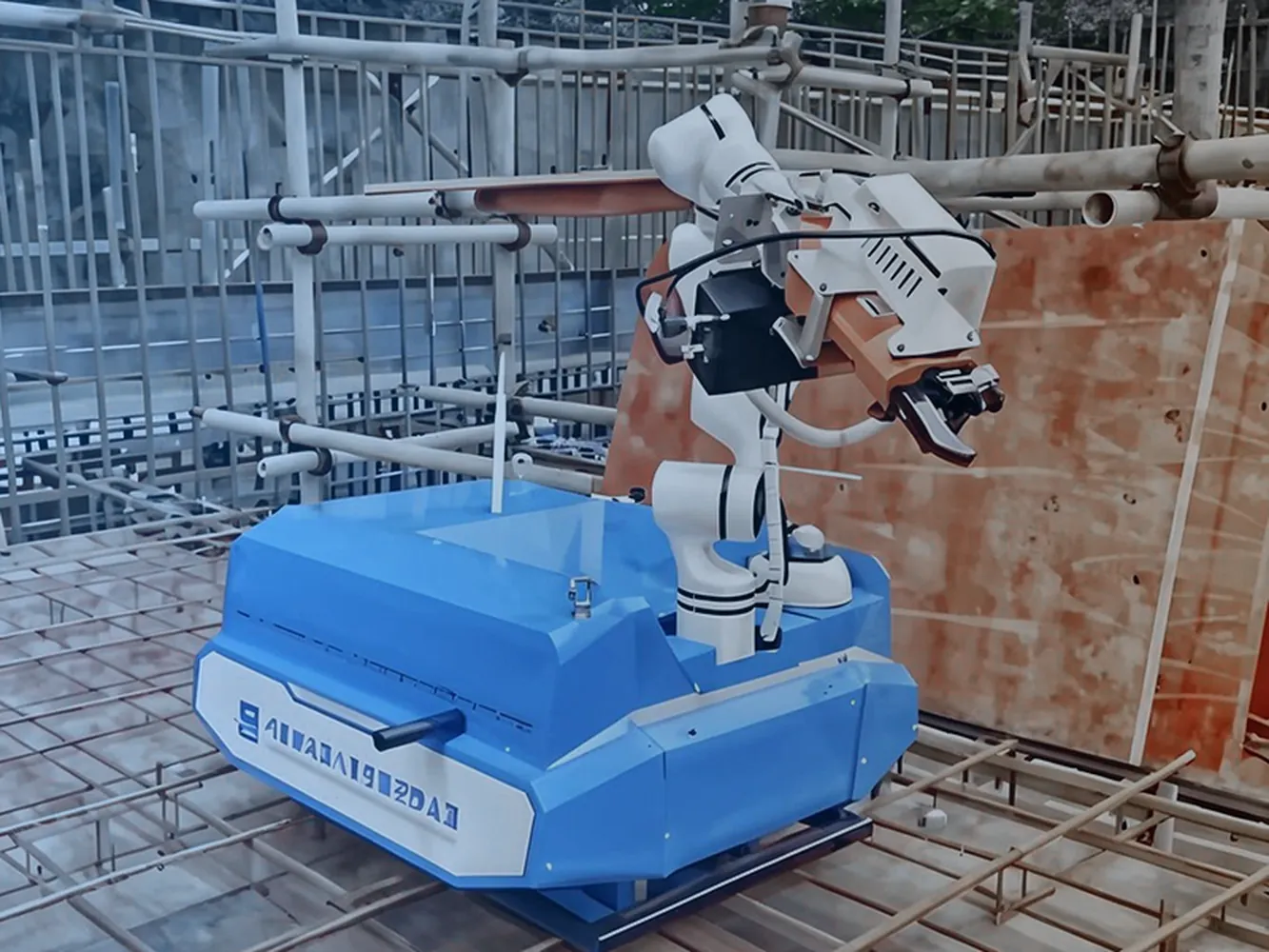
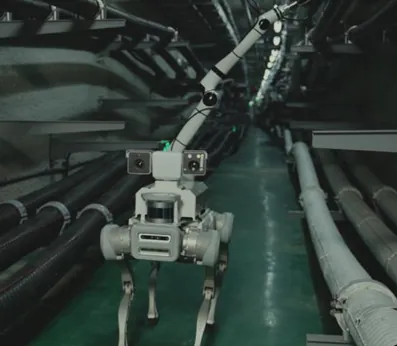
Monitoring and inspecting hazardous or inaccessible areas of the plant


For example for painting, welding, surface treatment, sorting, quality control.
It can be integrated into a wide range of workflows by adding the appropriate adapters.
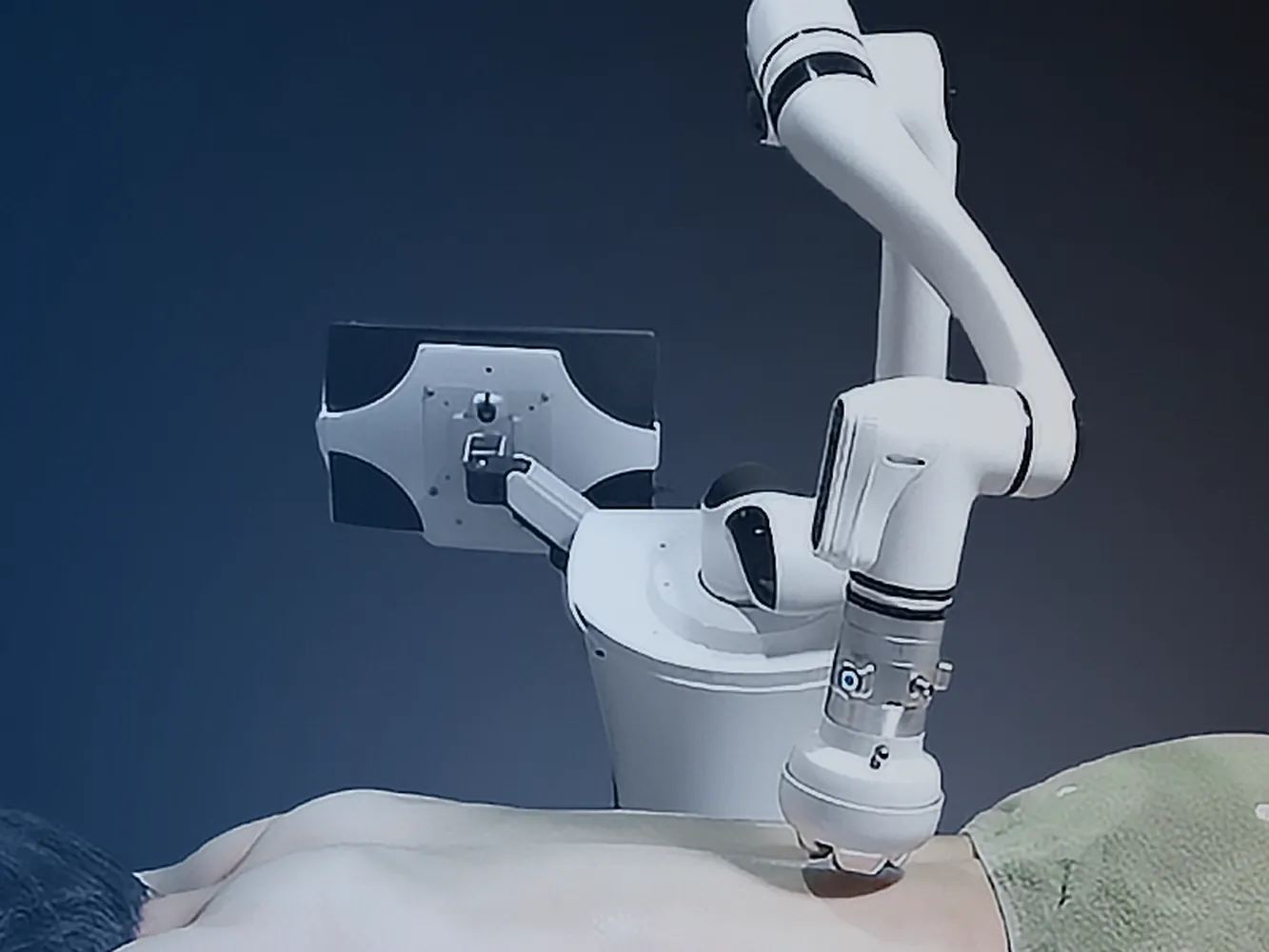
Acupuncture massage, medical assistance, elderly care, support for people with disabilities





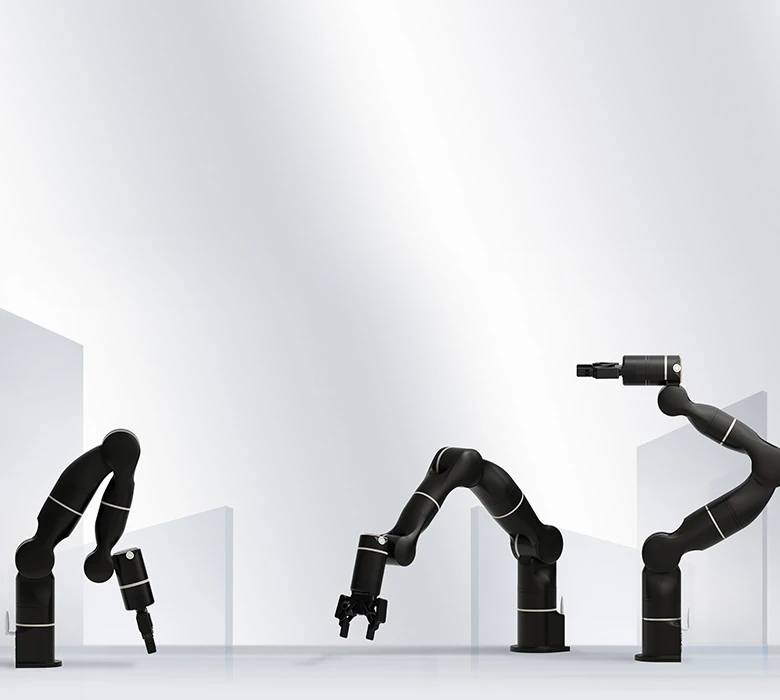
From RM series ultralight humanoid robotic arm independently developed and manufactured by RealMan, available in 6 and 7 degrees of freedom (DOF). The range comprises four models: the basic RM65/75-B versions and the RM65/75-6F six-axis force-sensing versions.
The robot arm has an integrated safety module that immediately stops operation in the event of contact, ensuring human-machine interaction security.


The robotic arm has a special weight-to-weight ratio: it weighs only 7.2 kg, while its nominal load capacity is 5 kg. It a load-to-weight ratio of 1:1.44 and a peak load capacity of up to 9 kg.
These technical parameters make it ideal for applications where both speed and power, so the robotic arm offers versatility in a compact size.
The robot arm is fully integrated control unit built into the arm structure, which both reduces weight and facilitates installation. The optimised design not only reduces installation complexity but also increases the overall efficiency of the robot.
7,2 kg
5 kg
610mm
±0.05mm
7,3 kg
5 kg
638,5mm
±0.05mm
7,8 kg
5 kg
610mm
±0.05mm
7,9 kg
5 kg
638,5mm
±0.05mm
| RM65-B | RM65-6F | RM75-B | RM75-6F | |
|---|---|---|---|---|
Degree of freedom |
6 |
6 |
7 |
7 |
Load |
5kg | |||
Peak load |
9kg | |||
Own weight |
7.2kg |
7.3kg |
7.8kg |
7.9kg |
Repetition accuracy |
±0.05mm | |||
Radius of the working area |
610mm |
638.5mm |
610mm |
638.5mm |
Six-axis force range |
/ |
200N/7Nm |
/ |
200N/7Nm |
Six-axis force measurement accuracy |
/ |
<0.1% FS |
/ |
<0.1% FS |
Power supply |
DC24V | |||
Energy consumption |
Maximum power consumption: 200 W, average power consumption: 100 W | |||
Immunity level |
IP54 (robot arm) | |||
Material from |
Aluminium alloy | |||
Controller |
Integrated | |||
Communication mode |
WIFI / network port / Bluetooth / USB serial port / RS485 | |||
Control mode |
Drag and drop teaching / Tutorial / API / JSON | |||
Articular range of motion |
J1 ±178°、J2 ±130°、J3 ±135°、J4 ±178°、J5 ±128°、J6 ±360° |
J1 ±178°、J2 ±130°、J3±178°、J4 ±135°、J5 ±178°、J6 ±128°、J7 ±360° | ||
Maximum joint speed |
J1-J2 180°/s、J3-J6 225°/s |
J1-J2 180°/s、J3-J7 225°/s | ||
900 mm working radius excels in tasks that require a high level of high elongation and high accuracy require extensive working areas.


10,1 kg
3 kg
928,5mm
±0.05mm

10 kg
3 kg
900mm
±0.05mm
| RML63-6F | RML63-B | |
|---|---|---|
Degree of freedom |
6 | |
Load |
3kg | |
Own weight |
10,1kg |
10kg |
Repetition accuracy |
±0.05mm | |
Radius of the working area |
928,5mm |
900mm |
Six-axis force range |
200N/7Nm |
/ |
Six-axis force measurement accuracy |
<0.1% FS |
/ |
Power supply |
DC24V | |
Energy consumption |
Maximum power consumption: 200 W, average power consumption: 100 W | |
Immunity level |
IP54 (robot arm) | |
Material from |
Aluminium alloy | |
Controller |
Integrated | |
Communication mode |
WIFI / network port / Bluetooth / USB serial port / RS485 | |
Control mode |
Drag and drop teaching / Tutorial / API / JSON | |
Articular range of motion |
J1 ±178°、J2 ±178°、J3 +145°~-178°、J4 ±178°、J5 ±178°、J6 ±360° | |
Maximum joint speed |
J1-J2 180°/s、J3-J6 225°/s | |
The ECO62 robotic arm capable of moving heavy loads despite its compact size. It offers outstanding industrial performance, meeting the requirements of collaborative and fast operations in tight spaces. Its lightweight, streamlined design provides innate safety and its smooth movements contribute to safe human-robot interaction.
The ECO62 arm provides support for a variety of industrial, medical, commercial service and educational applications and customisations.


7,9 kg
5 kg
638,5mm
±0.05mm

7,8 kg
5 kg
610mm
±0.05mm

3,3kg
2 kg
355mm
±0.05mm
| ECO65-6F | ECO65-B | ECO62-B | |
|---|---|---|---|
Degree of freedom |
6 | ||
Load |
5kg |
5kg |
1kg/2kg |
Own weight |
7,9kg |
7,8kg |
3,3kg |
Repetition accuracy |
±0.05mm | ||
Radius of the working area |
638.5mm |
610mm |
355mm |
Six-axis force range |
200N/7Nm |
/ |
/ |
Six-axis force measurement accuracy |
<0.1% FS |
/ |
/ |
Power supply |
DC20~30V,DC24V | ||
Energy consumption |
Maximum power consumption: 200 W, average power consumption: 100 W | ||
Immunity level |
IP54 (robot arm) | ||
Material from |
Aluminium alloy +ABS | ||
Controller |
Integrated | ||
Communication mode |
WIFI / network port / Bluetooth / USB serial port / RS485 | ||
Control mode |
Drag and drop teaching / Tutorial / API / JSON | ||
Articular range of motion |
J1 ±178°、J2 ±135°~178°、J3 ±145°~160°、J4 ±178°、J5 ±178°、J6 ±360° |
J1 ±178°、J2 ±135°~178°、J3 ±145°~160°、J4 ±178°、J5 ±178°、J6 ±360° |
J1 ±178°、J2 +62°~-178°、J3 +126°~-150°、J4 ±150°、J5 ±170°、J6 ±360° |
Maximum joint speed |
J1-J2 180°/s、J3-J6 225°/s |
J1-J2 180°/s、J3-J6 225°/s |
/ |
This product is the durability and cost-effectiveness through comprehensive innovation and design of its basic mechanisms, by reducing the number of components and simplifying the structure.

6,6 kg
2 kg
600mm
1mm
| GEN72-B | |
|---|---|
Degree of freedom |
7 |
Load |
2kg |
Own weight |
6,6kg |
Repetition accuracy |
1mm |
Radius of the working area |
600mm |
Power supply |
DC20~30V,DC24V |
Energy consumption |
Maximum power consumption: 200 W, average power consumption: 100 W |
Immunity level |
IP54 (robot arm) |
Material from |
Aluminium alloy +ABS |
Controller |
Integrated |
Communication mode |
WIFI / network port / Bluetooth / USB serial port / RS485 |
Control mode |
Drag and drop teaching / Tutorial / API / JSON |
Articular range of motion |
J1 ±178°、J2 +105°~-105°、J3 +178°~-178°、J4 +55°~-178° 、J5 +178°~-178°、J6 +0°~-220°、J7 +178°~-178° |
Joint lock |
The J1-J3 joints have been given a hard brake function The J4-J6 joints have been equipped with a soft brake function |
TCP maximum speed |
1.88m/s |
From ultra-light humanoid robotic arms technology, RealMan offers its users a range of solutions, including two-armed compound robots, two-armed lifting robots, single-arm compound robots, compound lifting robots, and various combined robots.


It generates trajectories based on infrared thermal imaging, can reproduce master-level human massage techniques in cooperation with the flexible force control of the robotic arm, and is widely used in massage, physiotherapy, moxa therapy, etc.

Compared to a conventional compound robot, the complex lifting robot has a built-in lifting system that further expands the robot's working envelope. At the same time, executive devices and an open-source 3D vision sensor have been installed at the end of the robot arm to ensure greater task accuracy and flexibility of the robot.
Models: RMC-LA, RML-125-1800

A complex robot is more advanced in design, able to adapt to environments of high complexity and precision, and has mobility, autonomy and interoperability. Not only can it perform material handling tasks, it can also be integrated into the production line, where it performs specific processing operations related to specific workflows - tasks that non-standard automation equipment cannot handle.
|
Compound lifting robot: RMC-LA |
Compound lifting robot: RML-125-1800 | Composite robot | |
|---|---|---|---|
Height |
1630mm |
2430mm |
1355 mm |
Mass |
~76kg |
~88kg |
~53kg |
Source of supply |
Single-phase, three-wire, 220 V ±10%, 50 Hz | ||
Operating voltage |
DC24V | ||
Security protection |
Laser obstacle avoidance, visual obstacle avoidance, force sensors, emergency stop, etc. | ||
External interface |
Network interface, USB port, HDMI port | ||
Business environment |
Temperature: -10 °C to +40 °C, relative humidity: ≤ 85% (at 25 °C), altitude: <4000 m | ||
Sound module |
– | ||
Lifting distance |
– |
1,8m |
– |
Lifting speed |
150mm/s |
150mm/s |
– |
Movement speed |
– |
– |
1m/s |
Main control module |
GPU: 384-core NVIDIA Volta™ GPU with 48 Tensor Cores
CPU: 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6MB L2 + 4MB L3 Memory: 8GB 128-bit LPDDR4x 59.7GB/s Operating system: Ubuntu18.04 Number of network interfaces: 1 Number of USB3.0 interfaces: 4 Number of USB2.0 interfaces: 1 Other interfaces: GPIOs, I2C, I2S, SPI, UART Size: 90mm×103mm×35mm |
GPU: 128-core Nvidia Maxwell
CPU:4-core A57@1.43GHz Memory: 4GB 64 bits Operating system: Ubuntu18.04 Number of network interfaces: 1 Number of USB3.0 interfaces: 4 Number of USB2.0 interfaces: 1 Other interfaces: GPIOs, I2C, I2S, SPI, UART Size: 100mm*80mm*29mm | |
From ultra-light humanoid robotic arm is easy to use and its system open and highly compatible. At the end of the arm general interface offers a flexible, plug-and-play solution and supports secondary improvements is.

This gripper features an innovative linear drive linkage mechanism that provides force-position control, wide opening range, low weight, self-closing function in case of power failure and ROS support.
As the end tool of the collaborative robotic arm, it is mainly used in areas such as loading and unloading, sorting, unmanned retail, education and research.
| EG2-SF16 | |
|---|---|
Tightening |
0-20N |
Accuracy of clamping force adjustment |
±1N |
Repetition accuracy |
±0.5mm |
Total displacement |
0-70mm |
Total closing time |
1,3s |
Mass |
231g |
Communication interface |
RS485 |
Operating voltage |
24V DC±10% |
Peak current |
0,7A |
Immunity level |
IP40 |
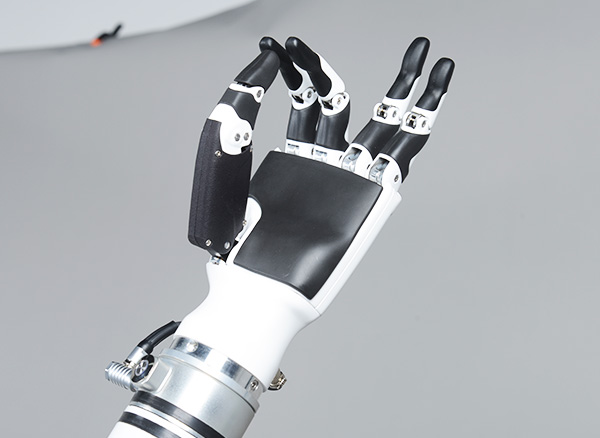
This five-fingered, dexterous robotic hand, also known as a „piano hand”, can move quickly and has a slightly smaller grip. It has a built-in force sensor, 6 degrees of freedom, 12 moving joints and ROS support.
Combined with a force-position hybrid control algorithm, it can simulate complex movements such as playing the piano or boxing punches.
| RM56S2B-2L | |
|---|---|
Communication interface |
RS485 |
Degree of freedom |
6 |
Number of joints |
12 |
Mass |
530g |
Operating voltage |
24V DC±10% |
Peak current |
2A |
Repetition accuracy |
±0.2mm |
Maximum clamping force of the thumb |
15N |
Four-finger thumb grip |
10N |
Catch resolution |
0.5N |
Lateral rotation range of the thumb |
>65° |
Lateral sleeve swing speed |
107°/s |
Thumb flexion speed |
70°/s |
Four-finger bending speed |
260°/s |
This five-fingered dexterous robotic hand, also known as a „piano hand”, can move quickly and has a slightly smaller grip range. It has a built-in force sensor, 6 degrees of freedom, 12 moving joints and ROS support.
Combined with a force-position hybrid control algorithm, it can simulate complex movements, such as playing the piano or boxing.
| RM56S2B-2R | |
|---|---|
Communication interface |
RS485 |
Degree of freedom |
6 |
Number of joints |
12 |
Mass |
530g |
Operating voltage |
24V DC±10% |
Peak current |
2A |
Repetition accuracy |
±0.2mm |
Maximum clamping force of the thumb |
15N |
Four-finger thumb grip |
10N |
Catch resolution |
0.5N |
Lateral rotation range of the thumb |
>65° |
Lateral sleeve swing speed |
107°/s |
Thumb flexion speed |
70°/s |
Four-finger bending speed |
260°/s |

DH Robotics' RGI series is the first fully self-contained, infinite rotation electric gripper on the market. The housing measures only 50 × 50 mm, has two servo systems, a maximum clamping force of 100 N and a peak torque of 1.5 N-m. It also supports precision force and position control.
The RGI can perform gripping operations and endless rotation simultaneously within a single gripper, solving the cable twisting problem associated with non-standard designs and rotation operations. It is versatile in a wide range of applications.
| RGI-100-30 | |
|---|---|
Tightening force (one side) |
30-100N |
Total displacement |
0-30mm |
Rated torque |
0.5N.m |
Peak torque |
1.5N.m |
Rotating range |
Endless |
Recommended maximum load |
1.5kg |
Maximum rotation speed |
2160°/s |
Rotation repeatability accuracy |
±0.05° |
Position repeatability accuracy |
±0.02mm |
Opening/closing time |
0.7s/0.7s |
Mass |
1,5kg |
Size |
158×75.5x47mm |
Communication protocol |
RS485(MODBUS RTU), Digital I/O |
Operating voltage |
24V DC±10% |
Rated current |
1.0A |
Immunity level |
IP40 |
The AG series is an articulated type of adaptive electric gripper, independently developed by DH and designed specifically for collaborative robots. Thanks to its fine structure, it is suitable for stable gripping of workpieces of different shapes.
The AG series has won the 2019 and 2020 Red Dot Design awards for outstanding product design. These electric grippers can be used in precision industries such as semiconductor manufacturing and 3C electronics, as well as in general industries such as automotive and household appliances.
| AG-160-95 | |
|---|---|
Tightening force (one side) |
45-160N |
Total displacement |
0-95mm |
Opening/closing time |
0.7s/0.7s |
Mass |
1kg |
Size |
184.6×162.3x67mm |
Communication protocol |
RS485(MODBUS RTU), Digital I/O |
Operating voltage |
24V DC±10% |
Rated current |
0.8A |
Immunity level |
IP54 |

The ERG series is an electric rotary grab with integrated drive and control. The force, position and angle of rotation are adjustable and controllable. It is capable of endless forward and reverse rotation and is also suitable for mains applications.
Other features include drop detection and catch feedback, which increase reliability and safety.
| RG52-050 | |
|---|---|
Tightening |
2-50N |
Total displacement |
0-52mm |
Opening/closing time |
0.5s |
Mass |
0.85kg |
Communication protocol |
RS485(MODBUS RTU), Digital I/O |
Position repeatability accuracy |
±0.02mm |
Operating voltage |
24V DC±10% |
Rated current |
0.4A |
Immunity level |
IP54 |

The ERG series is an electric rotary grab with integrated drive and control. The force, position and angle of rotation are adjustable and precisely controllable. It is capable of endless forward and reverse rotation and is also suitable for mains applications.
It also has features such as drop detection and catch feedback that increase efficiency, reliability and safety.
| ERG32-150 | |
|---|---|
Tightening |
40-100N |
Total displacement |
0-32mm |
Rated torque |
0.2N.m |
Instantaneous torque |
1N.m |
Maximum rotation speed |
1500°/s |
Opening/closing time |
0.3s |
Mass |
0.65kg |
Communication protocol |
EtherCAT/RS485 optional |
Multiplication repeatability accuracy |
±0.02mm |
Rotation repeatability accuracy |
±0.02° |
Operating voltage |
24V DC±10% |
Rated current |
1.2A |
Immunity level |
IP40 |
The EVS series electric vacuum end tool is easy to use, quick to install and saves the cost of compressed air systems. It is programmable, has an IP40 protection rating and offers features such as power failure pressure hold, drop detection and grip feedback.
| EVS08 | |
|---|---|
Vacuum level |
5%~75% |
Air flow rate |
10L/min |
Own weight |
1.4kg |
Maximum load |
4kg |
Communication protocol |
RS485(MODBUS RTU), Digital I/O |
Operating voltage |
24V DC±10% |
Rated current |
1A |
Immunity level |
IP54 |
Suction/release time |
0.4s/0.2s |

The D435 is a 3D camera that integrates depth and RGB colour sensors as well as VCSEL projectors. It features a global shutter sensor and a large lens, which ensures excellent performance in low light conditions. The heart of the camera is the high-performance RealSense D430 module.
| D435C | |
|---|---|
Working distance |
0.2m-10m |
Depth resolution |
1280×720@90fps |
Colour resolution |
1920×1080@30fps |
Depth field of view |
87°x58°x95° |
Colour field of vision |
69.4°x42.5°x77° |
Relative accuracy |
2.0%@2000mm |
Size |
90x25x25mm |
Interface type |
USB3.0 |
Food supply |
5V |

The DaBai DCW is a binocular structure light camera that works with proprietary ASIC chips. It provides high overall performance, high resolution, high frame rate, and high precision depth data output with lower computing power requirements. Its wide field of view allows the camera to avoid obstacles in a larger field of view.
The depth image resolution can reach 1920×1080 @ 5/10 fps, while the average power consumption is less than 1.2 W. This allows the camera to enable robots to perform detection, obstacle avoidance, navigation and other functions.
| DaBai DCW | |
|---|---|
Working distance |
0.2m-2.5m |
Depth field of view |
H79° V62° D91° ± 3° Infrared FOV: H79° V62° D91° ± 3° |
Infrared field of view |
16:9 H86°V55°D93.5°±3° |
Colour field of vision |
4:3: H64°V55° |
Relative accuracy |
1.0%@1000mm 1.1%@2000mm |
Size |
89.82×25.10×25.10mm |
Interface type |
USB2.0 |
Food supply |
5V |
The DaBai DCW is a binocular structured-light camera that works with proprietary ASIC chips. It provides high overall performance, high resolution, high frame rate and high accuracy depth data output even with low computing power requirements. Its wide field of view allows obstacle avoidance in a larger field of view.
The depth image resolution can reach 1920×1080 @ 5/10 fps, while the average power consumption is less than 1.2 W. This allows the camera to support robotic detection, obstacle avoidance, navigation and other functions.
| RM-MVQ | |
|---|---|
Sensor type |
CMOS, rolling shutter |
Pixel |
6 million |
Resolution |
3072×2048 |
Data interface |
Gige |
Maximum image refresh rate |
19.1 fps @3072×2048 |
Size |
29x29x42mm |
Black and white |
colour |
Food supply |
9-24VDC |
Mass |
100g |
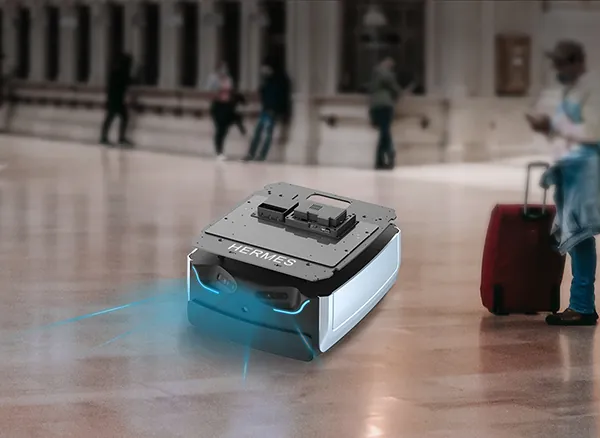
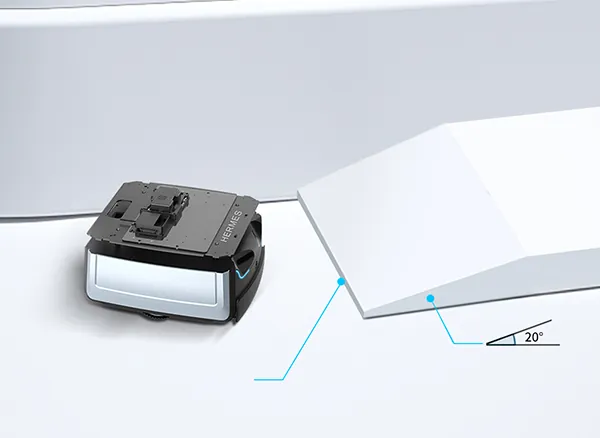
The Hermes robotic platform is equipped with Slam's proprietary navigation and positioning core, 360° LiDAR and two depth camera systems. It has excellent autonomous mobility and robust positioning and navigation capabilities, and is able to autonomously operate an elevator, thus ensuring multi-level barrier-free mobility.
| Hermes | |
|---|---|
Navigation mode |
Laser navigation |
Size (length × width × height) |
545*465*272mm |
Own weight |
40kg |
Rated load |
50kg |
Maximum load |
55kg |
Maximum speed |
1m/s |
Maximum limit exceedance |
20mm |
Maximum rate of climb |
10° |
Maximum ditch crossing capacity |
40mm |
Accuracy of movement |
±5cm |
Turning radius |
Turning on the spot |
Battery capacity |
25.2V,32Ah |
Control interface |
TCP connection (Ethernet/WiFi) |
Sensors |
LiDAR, 3D vision sensor, magnetic sensor, collision avoidance sensor |
Functions |
Space scanning with image capture and automatic reloading |
The Yunji mobile chassis is a wheeled robotic platform with full and sophisticated sensing, cognitive and positioning-navigation capabilities. It has a robust rollover protection design, supports stationary rotation and uses the robot CAN protocol for communication.
It has exceptionally strong positioning and clutter filtering capabilities, and supports autonomous route planning, autonomous obstacle avoidance, and extensive secondary research and development support.
| Water 2 | |
|---|---|
Navigation mode |
Laser navigation |
Size |
Diameter 505 mm, height 280 mm |
Own weight |
45kg |
Rated load |
50kg |
Maximum load |
80 kg |
Turning radius |
252.5mm |
Maximum speed |
1m/s |
Maximum threshold crossing ability |
18mm |
Maximum angle of climb |
10° |
Maximum ditch crossing capacity |
30mm |
Minimum passage width |
70cm |
Accuracy of movement |
±5cm |
Battery capacity |
25.2V,32Ah |
Control interface |
TCP connection (Ethernet/WiFi) |
Sensors |
LiDAR, 3D visual sensor, ultrasonic sensor, position sensor, infrared sensor, collision avoidance sensor |
Functions |
Space scanning with image capture and automatic reloading |

The SFG Flexible Grip is an innovative tool that mimics the shape of a starfish and the movements of the human hand. The gripper achieves a curved deformation by inflating to adapt itself around the target and perform the gripping action. By lowering, it performs an inverted deformation which allows the object to be placed or the prehooking operation to be performed.
The main features of the SFG gripper are good compatibility, multiple designs and gentle movement, making it ideal for gripping most irregular or fragile objects.
| RM-SFG | |
|---|---|
Load |
2130g |
Mass |
577g |
Maximum working pressure |
100kPa |
Grip size |
22-171mm |
Free consultation
Telephone: +36 20 971 7541
Email: contact@toprobots.biz
4440 Tiszavasvári, Kabay J. u. 29.
To provide you with the best user experience, we use technologies such as cookies to store and/or access information on your device. Consenting to these technologies allows us to process, for example, browsing data or unique identifiers on this website. Refusal or withdrawal of consent may adversely affect certain features and services.